
The increasing integration of man and machine, especially in industrial production and the incorporation of production processes into the "Internet of Things" as part of the "Industry 4.0" initiative requires a new generation of industrial automation. Robots, most of which operate independently, carry out a wide variety of activities such as welding, drilling, painting, loading and unloading, assembly, measuring, and other handling tasks, thereby providing interactive support for people. As a result, the requirements for precision, speed, and efficiency are constantly rising in order to further advance the achievable number and quality of a wide variety of products, but also to open up new fields of application right into the service sector.
This has a particular impact on the drive technology installed in the robot axes. Highly utilized drives with highly dynamic control on frequency inverters with simultaneous high efficiency and smooth running and low weight are required.
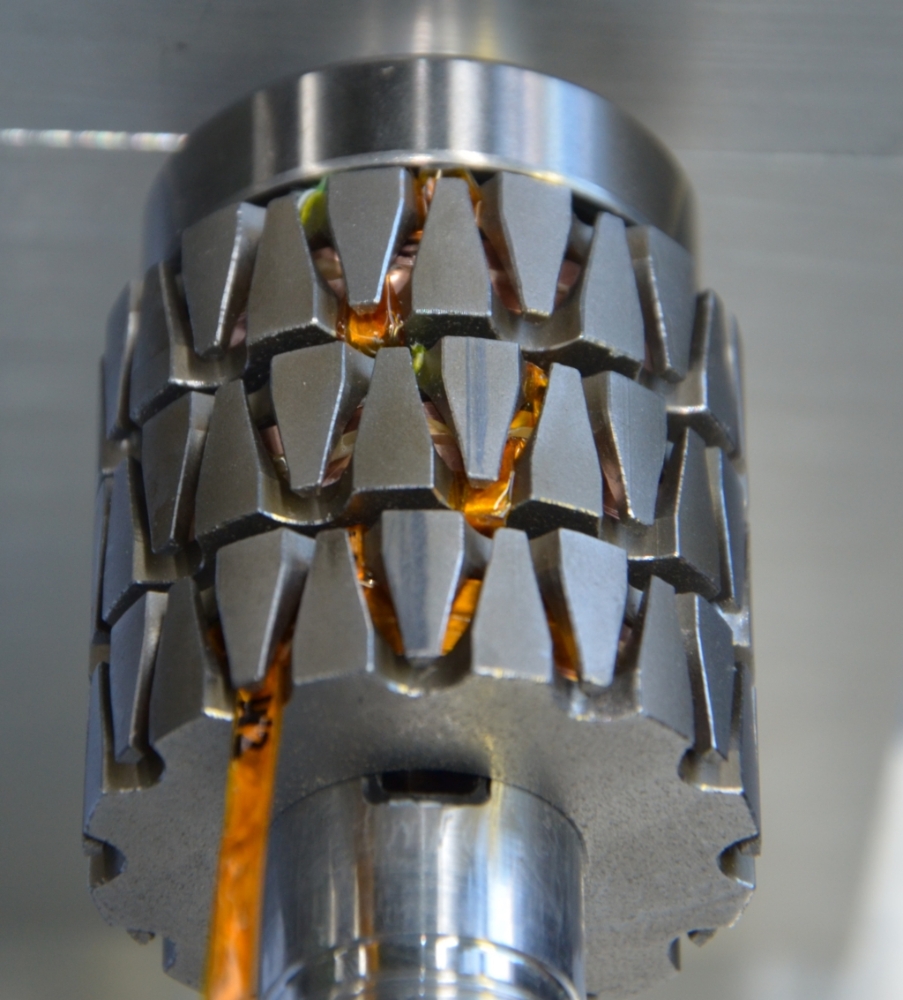
The transverse flux machine (TFM) with its high torque density at low speeds meets these requirements very well and makes it possible to save gear steps or the typically very high gear reduction. This can save costs and weight and improve overall drive performance. As part of a dissertation, a permanently magnetically excited, three-strand TFM with external rotor was developed, assembled, commissioned, and measured at the IEW as a drive for a shoulder joint of a 6-axis jointed-arm robot. In addition to the use of soft magnetic composites (SMC) as stator material and NdFeB high-energy permanent magnets, the focus of the dissertation was on optimizing torque density while simultaneously minimizing torque ripple.
The TFM is operated by means of a field-oriented control in dq coordinates on an industrial three-phase pulse inverter developed at IEW. The control runs on a MicroLabBox from dSPACE, allowing the entire drive system from simulation to commissioning to be developed and tested quickly and consistently. Monitoring and safety functions, signal processing, and supply of sensors and peripherals is carried out by modular signal electronics developed at the IEW.

The measurement of the TFM on the test bench provides the model parameters required for control, such as longitudinal and transverse inductance. It also serves to verify the 3D FEM model and analytical calculation methods, which can thus be continuously improved and further developed. The recording of torque and voltage curves as well as efficiency maps is carried out partially or fully automatically on the test bench.